PRIYANSH SINHA
About | Experience | Projects | Publications | Contact
About Me

Hi there! I’m Priyansh, and I’m a Robotics Engineer/Researcher.
Education
- MS by Research, IIIT-Hyderabad.
Experience
ChargeKart
An autonomous charging station that can be requested for your car in a gated parking.
Role:
Co-founder, Robotics Head
Developed and prototyped the Robot and along with ROS integration with NAV2.
OpenDroid
USA based home assisstive Mobile Manipulator.
Role:
Founding Team
Developed and designed the Mobile Manipulator along with procurement and integration of ROS( navigation + manipulation). Integration with LLM for basic arms movement. Designing behaviour for Robot for Home environment. (Example command/ use cases: Fetch an apple, etc) \
Projects
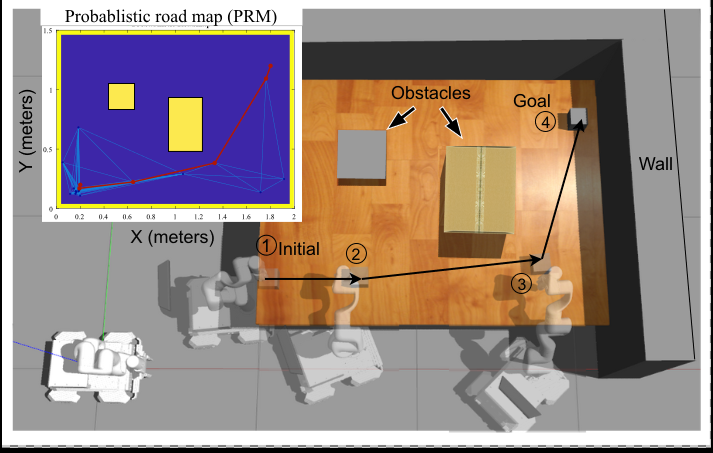
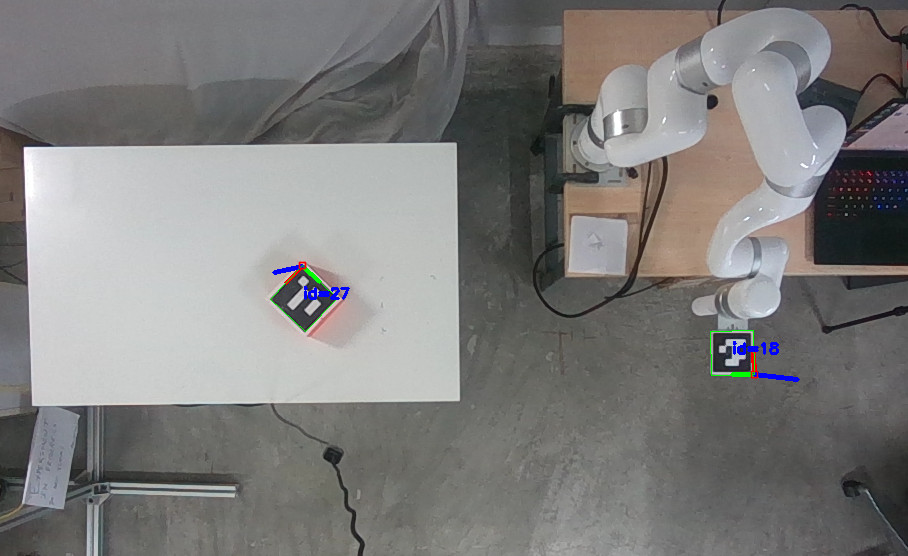
Mobile Manipulation

- Whole Body Control using ROS framework.
- Setting up of Navigation stack and low-level controller for the entire system.
- Performing tasks like Door Opening and other non-prehensile manipulation using Mobile Manipulator.
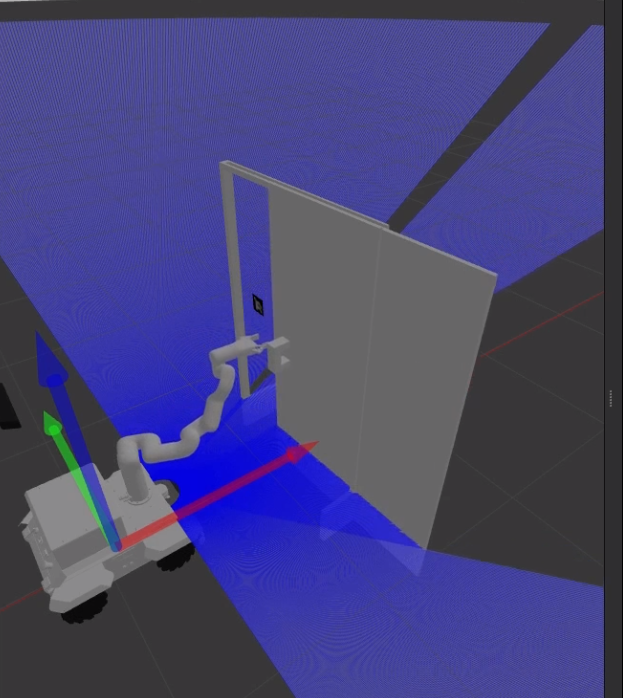
- Non Prehensile Manipulation using Optimisation frameworks.
Residual Learning for Manipulator Actions
- Implementation of Residual Learning using Neural Networks to bridge the sim-to-real gap in manipulator actions (non prehensile action:Striking), reducing control errors.
Visual Odometry
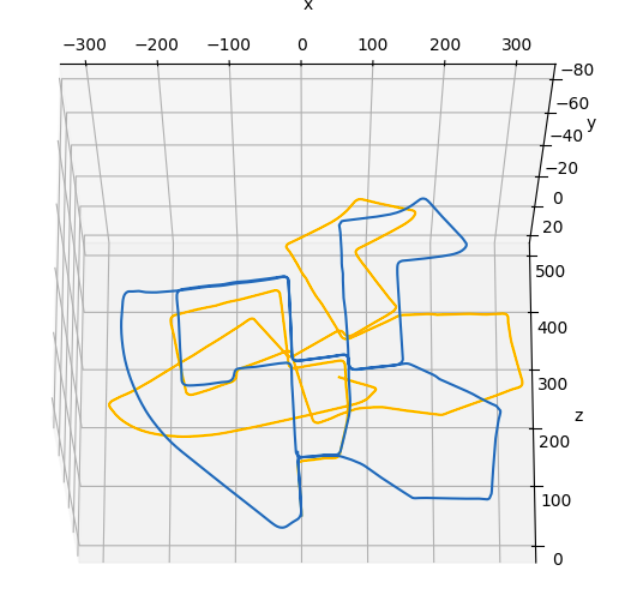
- Visual Odometry using Stereo and RGBD cameras for indoor and outdoor environments.
- Integrated Light Glue, a feature matcher, with the VO algorithm.

Trajectory Optimization
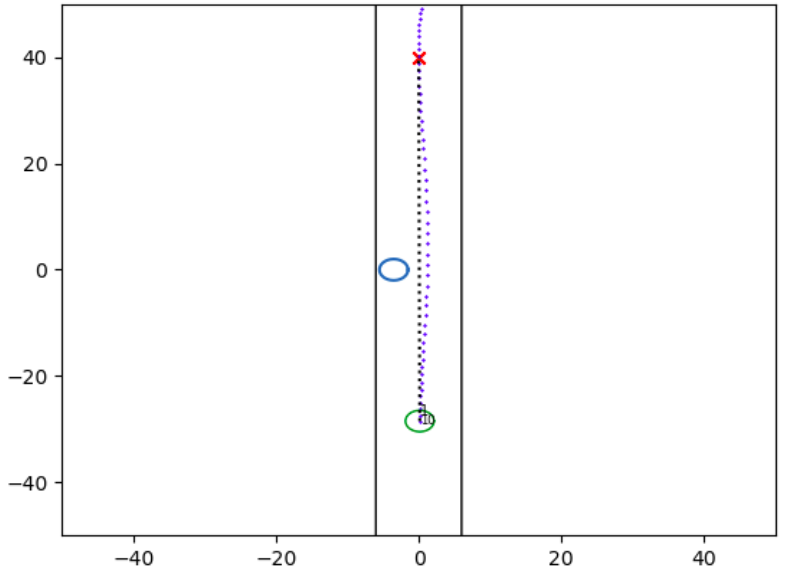
- Trajectory Optimization using sampling-based MPC for Robot Path Planning.
- Implemented Model Predictive Path Integral Update Rule for a time horizon.
Model-Based Controllers
- Implementation of Gravity Compensation, Force-Torque, Hybrid-Force-Position, Null-Space, and Operational Space Controllers on manipulators.
Publications & Thesis
📚 Thesis
Title: Planning and Control Strategies for Contact-Rich, Non-Prehensile Mobile Manipulation
📝 Publications
- IEEE CASE 2024 – A Hybrid Manipulation Framework with Trajectory Optimization for Mobile Manipulators.
📄 Read it here: IEEE Xplore Link
Courses
- Robotics Planning and Navigation
- Computer Vision
- Machine Learning
- Mobile Robotics
Contact Me
- Email: sinhapriyansh.15@gmail.com
- LinkedIn: Priyansh